Featured Product - QMED 4 - October 2016
Featured Product - QMED 4 - October 2016
Traditionally, opening a patient's thoracic wall requires fast movement and consistent torque to minimize trauma. This is accomplished with a hand cranked thoracic retractor operated by the surgeon. Utilizing this methodology, current loops are typically applied in place of a torque sensor to monitor torque when automating small systems. However, this setup offers poor accuracy and a non-linearity of ± 5–10%. Needless to say, a new, more precise platform is needed.
Here we have replaced the hand crank with a miniature, high-precision, brushless DC servo motor and gearhead. Alongside the DC servo motor is FUTEK's QTA141 Micro Reaction Torque Sensor, which has accuracy and non-linearity of ± 0.5%. Adopting this setup provides the surgeon with a faster and more accurate torque feedback system, in addition to benefiting the patient with less time spent in the operating room, a reduction in potential bone fractures, and a more rapid recovery time.
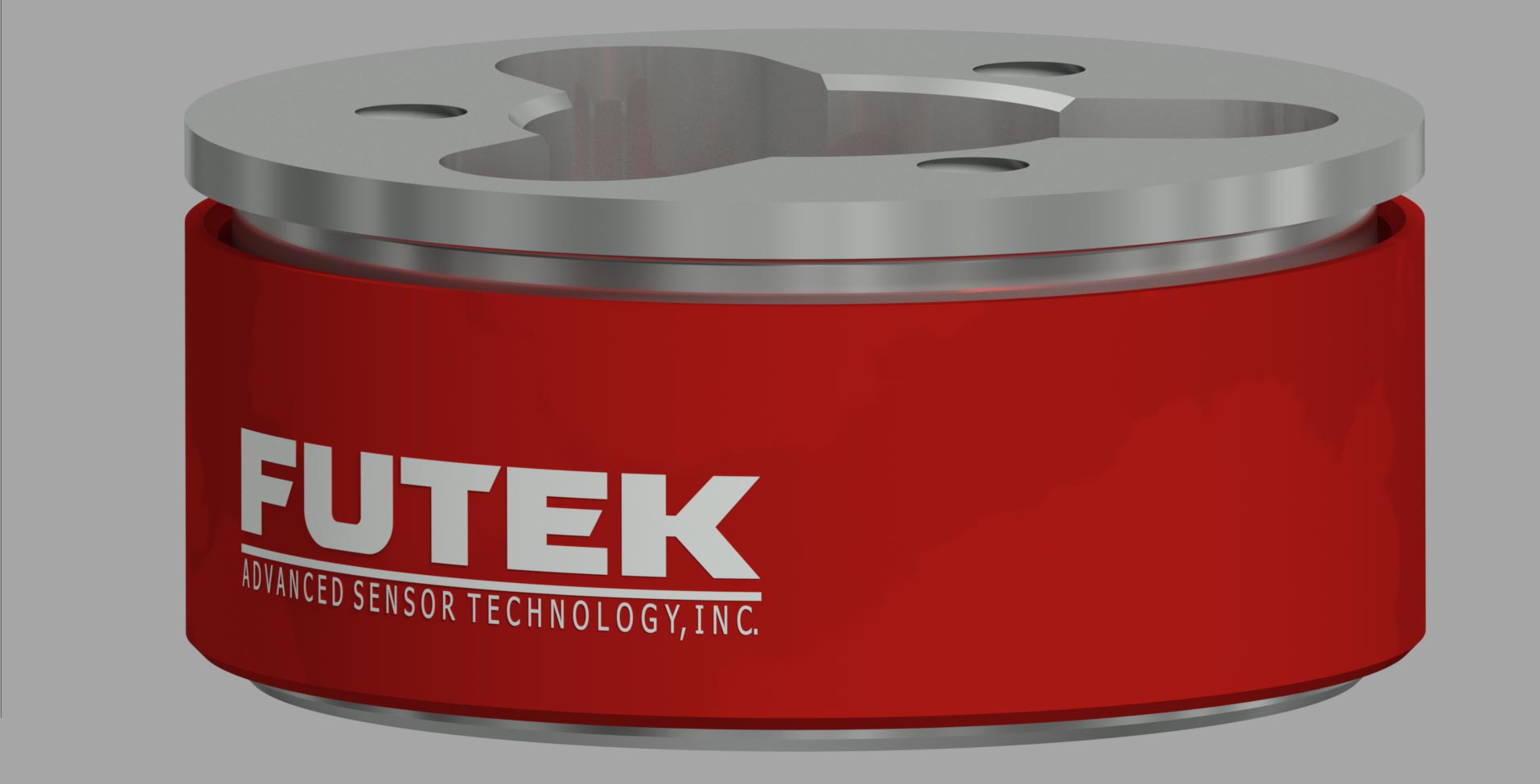
FUTEK's QTA141 miniature torque sensor provides high accuracy, strain gauge, torque measurement in a 0.86" diameter by 0.39" height package.
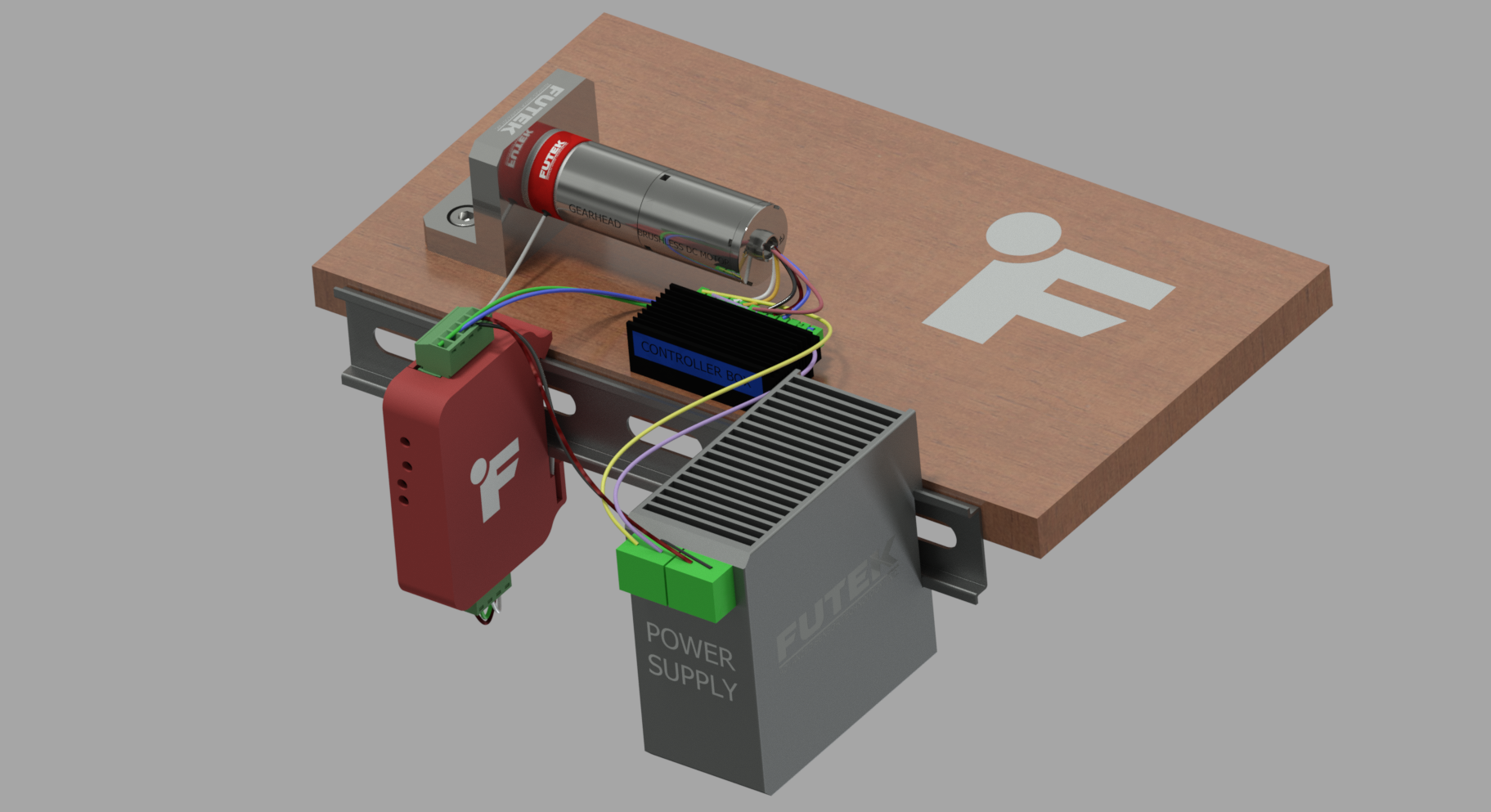
The QTA141, miniature servo motor, and gearhead with supporting electronics. FUTEK’s IAA series amplifier sends an amplified signal to the motor controller for closed loop control.
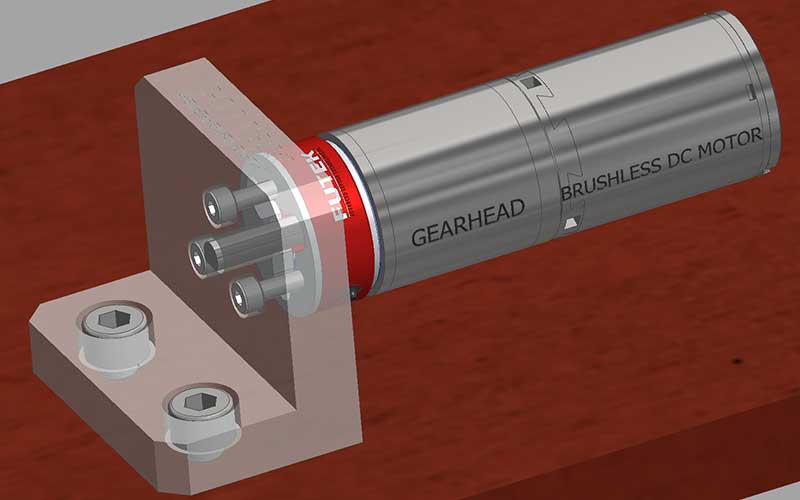
FUTEK’s QTA141 torque sensor integrated with the miniature DC servo motor and gearhead. The drive shaft passes neatly through the sensor, allowing for easy coupling.